Continuous point groups are symmetry groups described by continuous transformations (rather than discrete ones), where operations like rotations can vary smoothly and form a continuum of symmetries about a fixed point.
Examples include:
-
- SO(3): the group of all possible rotations about a point in three-dimensional space, with no reflections or inversions. It represents full rotational symmetry of a sphere and is a fundamental example of a continuous symmetry group in chemistry, physics and mathematics. This symmetry is a good approximation for spherically symmetric systems such as isolated atoms or idealised spherical tops.
-
: contains all possible rotations about an axis (infinite-fold rotational symmetry) plus an infinite number of vertical mirror planes. Heteronuclear diatomic molecules belong to this group.
-
: includes all the symmetry elements of
As the SO(3) group has been covered extensively in a previous article, we shall focus on the and
point groups.
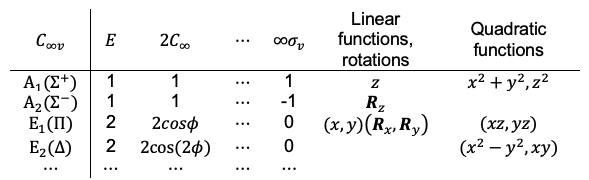
point group
To understand how the character table is derived, we must first define the basis functions. In general, the spherical harmonics
are used because they form a complete basis set for any point group.
is equivalent to the linear function
because
is invariant under all symmetry operations of a point group. Therefore,
is invariant under all symmetry operations of the point group. Mathematically, this means that it has an eigenvalue of +1 under every operation, for example
. Hence,
transforms according to the totally symmetric irreducible representation
. The rotation vector (or axial vector)
, however, transforms according to
because its curved arrow around the
-axis reverses under
and returns an eigenvalue of -1.
The remaining irreducible representations are doubly-degenerate and are generated from linear combinations of the basis functions and
. Under a rotation about the
-axis by an angle
, each component transforms as
:
The character corresponding to
is the trace of this 2×2 matrix. Using Euler’s formula
, we obtain
Although, the quantum numbers and
in
are associated with a single electron, they can be replaced by
and
for many-electron systems. In such cases, the basis functions are constructed as linear combinations of products of
. A properly coupled state with definite
and projection
is an eigenfunction of
, with
. Since each component of the linear combination has an azimuthal dependence proportional to
, the overall function transforms as
, where
. Therefore,
where we have swapped the arbitrary symbol with
to be consistent with the above character table.
Since and
correspond to the doubly-degenerate states
and
, we can rewrite:
where is the projection of
in a many-electron system.
This is why takes only non-negative integer values (including 0) and is denoted by special symbols known as molecular term symbols:

It follows that the irreducible representations are also labelled as
respectively. Setting
in eq130 corresponds to the identity operation
, which gives
for all doubly-degenerate irreducible representations. Furthermore, a reflection of the basis functions
and
in a plane containing the
-axis yields:
Thus,
with the character of and hence
being 0 for all doubly-degenerate irreducible representations.
point group
The point group, unlike the
point group, includes the inversion symmetry element. Although molecules that belong to this group, such as homonuclear diatomic molecules, are symmetric under inversion, the basis functions (orbitals or rotations) may or may not be. Therefore, every irreducible representation of
must be either symmetric or antisymmetric with respect to inversion. These are labelled with the subscripts
(gerade, German for “even”) or
(ungerade, German for “odd”).
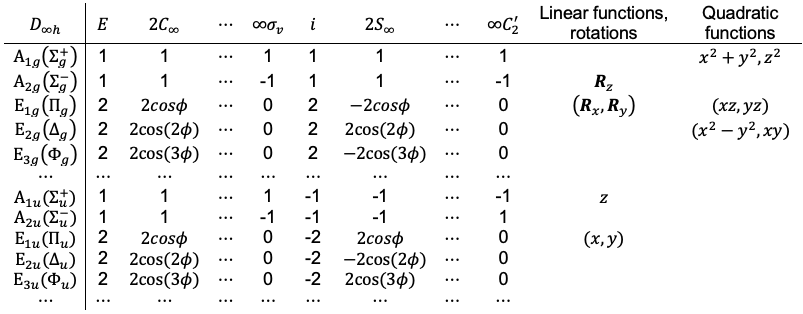
The characters associated with all and
irreducible representations for
,
and
are the same as those in the
point group. Since performing the inversion operation twice returns every point to its original position, we have
, where
is the identity matrix. For a one-dimensional representation, this restricts the possible characters of
to +1 (for a gerade irreducible representation) or -1 (for an ungerade irreducible representation). The matrix representation of
in a two-dimensional representation must be:
with ,
for gerade representations, and
,
for ungerade representations.
Since and the basis function is invariant under the rotation for one-dimensional irreducible representations,
. Therefore, the characters
for
and
representations are +1 and -1 respectively. Noting that
, multiplication on the right by
gives
. A rotation by 180° about the
-axis gives the eigenvalue of -1 for odd
states (e.g.
) and +1 for even
states (e.g.
). Thus,
is given by
for
. It follows that for two-dimensional representations:
where for gerade irreducible representations and -1 for ungerade irreducible representations.
Therefore, for two-dimensional
and
irreducible representations are
and
respectively.
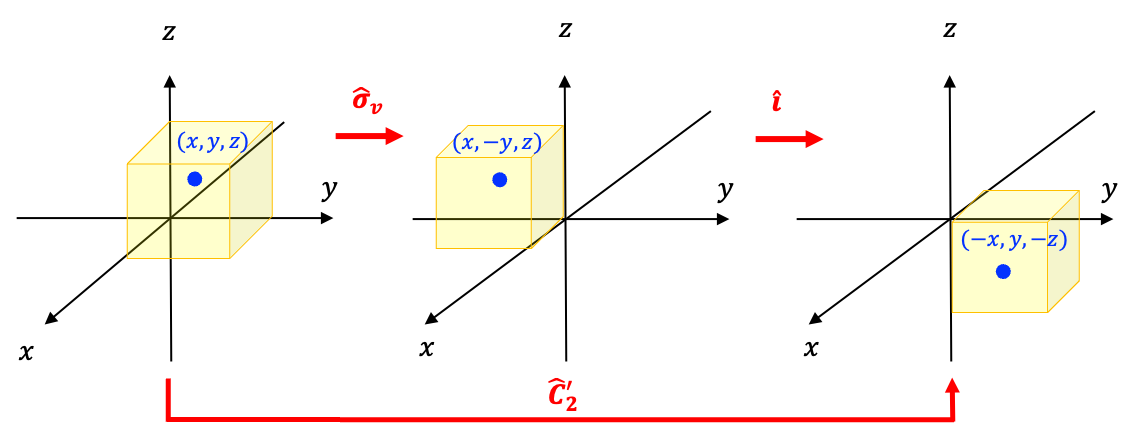
Finally, denotes a rotation about an axis perpendicular to the
-axis. It can be expressed as
because
transforms
and
then transforms
, which is equivalent to a net rotation of 180° about the
-axis (see diagram above). Therefore,
, resulting in the corresponding characters in the
character table.