A change of basis is a method to convert vector coordinates with respect to one basis to coordinates with respect to another basis.
Consider a vector u with reference to orthogonal unit basis vectors x1, x2 and x3.
where p, q and r are the scalar components of the unit basis vectors x1, x2 and x3 respectively. Clearly,
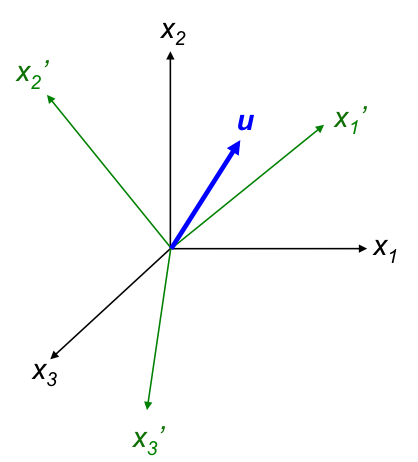
If we define u with respect to another orthogonal reference frame with unit basis vectors x’1, x’2 and x’3 (see above diagram), we have:
and
To find the relationship between the two reference frames, we substitute eq1 in eq4 to give:
Since the dot product of two vectors gives a scalar, we can write eq5, eq6 and eq7 as:
which can be expressed in the following matrix equation:
where . The matrix containing aij is known as the change of basis matrix . We can rewrite eq8 as:
where and
. Eq9 is often written as a short form by omitting the summation symbol:
For example, the change of basis from the orthogonal basis xj to the orthogonal basis x’i as a rotation about the x3-axis, where x3 coincides with x’3 (x’3 = x3 and is perpendicular to the plane of the page), is depicted as:
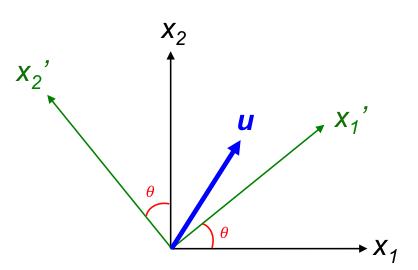
To determine the change of basis matrix, we have
Therefore,
Consider again the vector u with reference to a coordinate system that is defined by the orthogonal unit basis vectors x1, x2 and x3 (see diagram below).
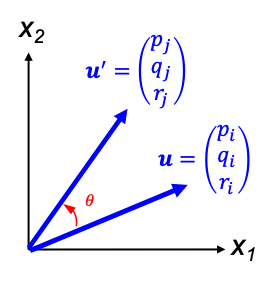
The rotation of u with respect to this fixed coordinate system is expressed as:
Compared to the change of basis of u that was described earlier, the rotation matrix R is the inverse of the change of basis matrix (similarly, a reflection matrix is the inverse of the change of basis matrix by a reflection). In other words, the rotation of u by θ can be perceived a change of basis, with the coordinate system rotated by –θ. This implies that we can analyse a problem in two ways.
