The third constitutive relation hypothesis states that the shear stress tensor is zero if the flow involves no shearing of the fluid-body.
A square matrix A is symmetric if aij = aji for all i and j, i.e. A = AT, e.g.
A square matrix is anti-symmetric (or skew symmetric) if aij = –aji for all i and j, i.e. –A = AT, e.g.
If aij = –aji , the diagonal components of the matrix must all be zero.
In general, we can write a square matrix in the following form:
where B = (A + AT)/2, C = (A – AT)/2 and AT is the transpose of A.
Question
Prove that .
Answer
Let and
be the elements in the
-th row and
-th column of
and
respectively. By definition of matrix addition,
and
. Therefore, every element of
equals the corresponding element of
.
Using the transpose identity of (X + Y)T = XT+ YT, we can show that B is symmetric (B = BT) and C is anti-symmetric (C = –CT).
This means that a square matrix can be decomposed into a symmetric and an anti-symmetric component. From the previous section, is a second-order tensor that can be represented by a 3×3 matrix. Therefore,
where is symmetric and
is anti-symmetric.
Substituting eq9 in eq8 gives,
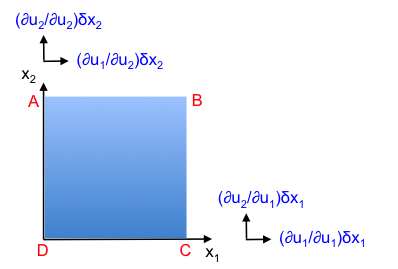
Consider a two-dimensional body of fluid ABCD as depicted in the above diagram. The term tends to shear the fluid, while the term
tends to rotate the fluid. This means that even if the shear component
is zero, i.e.
, the rotation component
is non-zero. However, hypothesis 3 states that the shear stress tensor τij in eq10 is zero if the flow involves no shearing of the fluid-body. To satisfy hypothesis 3, eq10 becomes:
βijkl , which is composed of eighty-one components, characterizes the properties of the fluid. Since is symmetric, and βijkl consists of scalar components, τij is also symmetric.