A subgroup is a collection of elements within a larger group that forms its own distinct group. For example, is a subgroup of
(see multiplication table below).
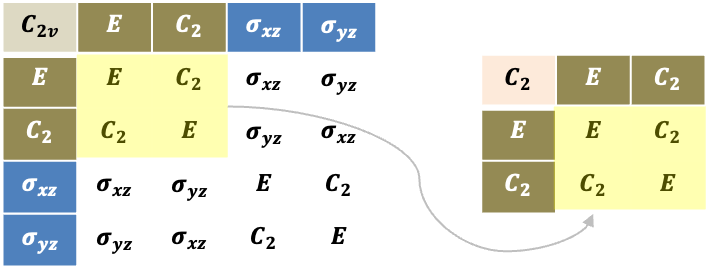
A group is always a subgroup of itself; such a subgroup is called an improper subgroup. Every group has a trivial subgroup, which contains only the identity element. All other subgroups are known as proper subgroups.
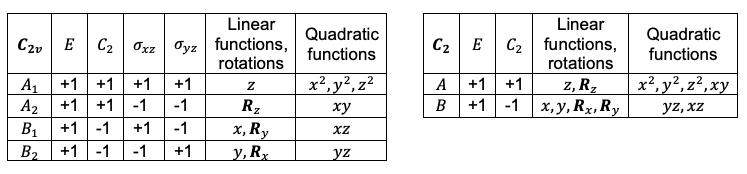
The irreducible representations of the subgroup and its parent group, generated from the same set of basis functions, exhibit identical characters associated with symmetry operations that are common to both groups (see character tables below). This occurs because
A basis function undergoing a specific symmetry operation is associated with the same transformation matrix and, consequently, the same trace in both the subgroup and its parent group.
We say that the representations of a subgroup and its parent group are correlated. For example, and
of the
point group are correlated to
and
of the
point group, respectively. The correlation of representations of two point groups can be used to determine the nature of certain properties of a basis function. This is especially relevant when the properties, for instance spin, are independent of the spatial coordinate system and therefore invariant under any symmetry operations. Further explanation can be found in the next article.
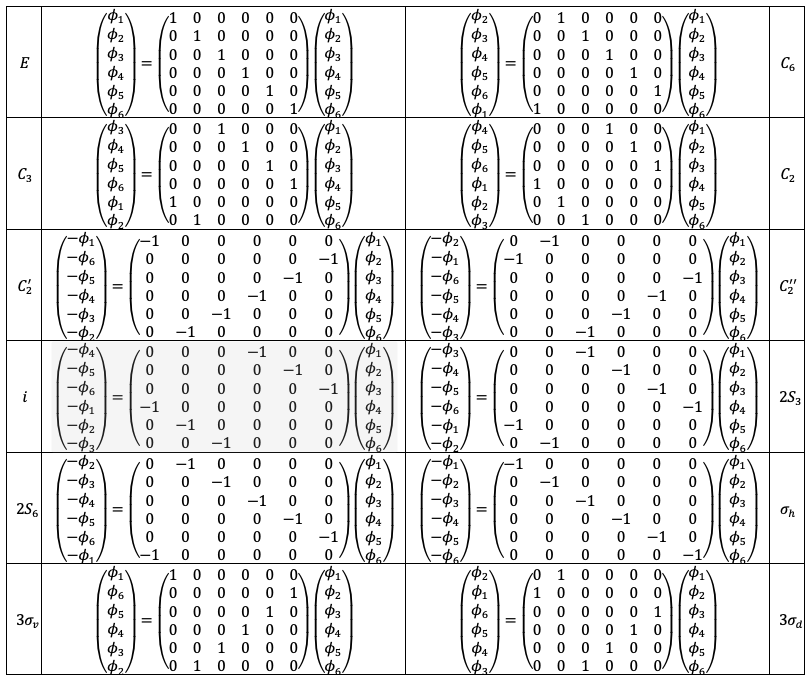
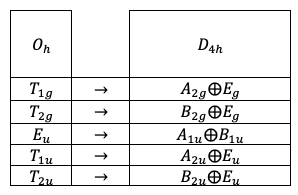
Let’s consider a more complicated case: and its subgroup
. When comparing the character tables (see below) of both groups, it becomes evident that the symmetry operations
and
of
are not preserved in
. However, apart from the identity and inversion symmetry operations, the remaining symmetry operations of
are partially preserved (e.g. five of the fifteen
symmetry operations). To simplify the correlation of irreducible representations between the two groups, we focus on the symmetry operations that are unambiguously preserved. In the descent of symmetry from
to
, the preserved operations include
,
,
,
,
and
. Consequently,
,
,
and
of
are correlated to
,
,
and
of
, respectively.

of
does not appear to correlate with any single irreducible representation of
. However, there must exist a basis function that transforms according to both
of
and a representation of
. The logic behind this begins with the fact that if a chemical species is invariant under the symmetry operations of a group
, it is also invariant under the symmetry operations of a subgroup of
. Therefore, a basis function that transforms according to an irreducible representation of
must also transform to a representation of the subgroup of
. Since a basis function associated with
of
does not transform according to any irreducible representation of
, it must transform according to a reducible representation of
.
As mentioned above, a basis function undergoing a specific symmetry operation is associated with the same transformation matrix and, consequently, the same trace in both the subgroup and its parent group. This implies that of
correlates to the reducible representation that is a direct sum of the
irreducible representations
. Similarly, we have
Question
How does the reducible representation of
correlate to
?
Answer
The corresponding transformation matrix of the representation of must be a direct sum of
matrices of
.
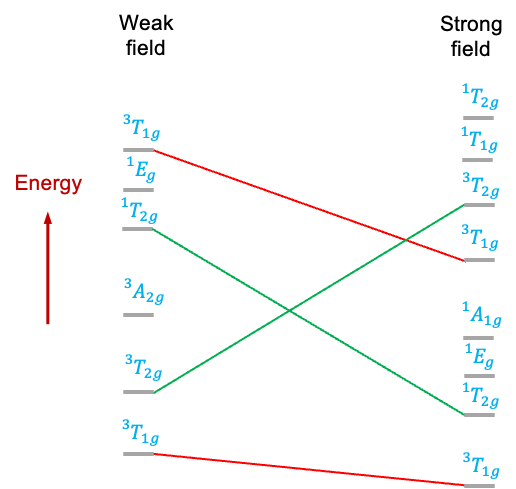
In summary, a descent in symmetry occurs when a subgroup inherits symmetries from its parent group, preserving certain properties while reducing the overall complexity. It is useful for determining normal modes of molecules belonging to infinite point groups and for constructing weak-strong ligand field correlation diagrams.