The determinant is a number associated with an  matrix
matrix  . It is defined as
. It is defined as

where
-
 is an element of in the first row of .
is an element of in the first row of .^{1+j}M_{1j}^A) is the cofactor associated with .
is the cofactor associated with . , the minor of the element
, the minor of the element  , is the determinant of the
, is the determinant of the  matrix obtained by removing the
matrix obtained by removing the  row and
row and  -th column of .
-th column of .
In the case of  , we say that the summation is a cofactor expansion along row 1. For example, the determinant of
, we say that the summation is a cofactor expansion along row 1. For example, the determinant of  is
is

For any square matrix, the cofactor expansion along any row and any column results in the same determinant, i.e.

To prove this, we begin with the proof that the cofactor expansion along any row results in the same determinant, i.e. ^{i+j}M_{ij}^A) for . Consider a matrix
for . Consider a matrix  , which is obtained from by swapping row
, which is obtained from by swapping row  consecutively with rows above it
consecutively with rows above it  times until it resides in row 1. According to property 8 (see below), we have
times until it resides in row 1. According to property 8 (see below), we have
^{i-1}\vert B\vert=(-1)^{i-1}\sum_{j=1}^nb_{1j}(-1)^{1+j}M_{1j}^B\\=(-1)^{i-1}\sum_{j=1}^na_{ij}(-1)^{1+j}M_{ij}^A=\sum_{j=1}^na_{ij}(-1)^{i+j}M_{ij}^A)
According to property 10,  and therefore, the cofactor expansion along any column also results in the same determinant. This concludes the proof.
and therefore, the cofactor expansion along any column also results in the same determinant. This concludes the proof.
In short, to calculate the determinant of an matrix, we can carry out the cofactor expansion along any row or column. If we expand along a row, we have  . We then select any row to execute the summation. Conversely, if we expand along a column, we get
. We then select any row to execute the summation. Conversely, if we expand along a column, we get  .
.
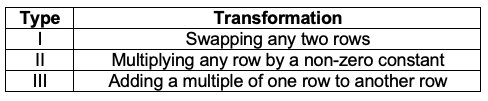
The following are some useful properties of determinants:
-
 , where is
, where is  the identity matrix. If one of the diagonal elements of is
the identity matrix. If one of the diagonal elements of is  , then
, then  .
.
- If the elements of one of the columns of are all zero,
 .
.
- If is obtained from by multiplying the
 -th row of by ,
-th row of by ,  .
.



- If is obtained from by swapping two rows or columns of , then

- If two rows or two columns of are the same, .
- The inverse of a matrix exists only if
 .
.
- If
 , then
, then  .
.
- If , then
 . If , then
. If , then  .
.
- If is diagonal, then
 .
.
Proof of property 1
We shall proof this property by induction.
For  ,
,

For  ,
,
(-1)^2M_{11}+(0)(-1)^3M_{12}=(1)(-1)^2(1)=1)
Let’s assume that for  ,
,  . Then for
. Then for  ,
,
I_{1n}+1=1)
We can repeat the above induction logic to prove that if one of the diagonal elements of is .
Proof of property 2
Again, we shall proof this property by induction.
For ,

For ,
(-1)^2M_{11}+c(0)(-1)^3M_{12}=c\vert ci_{22}\vert=c(c)=c^2)
Let’s assume that for , we have  . Then for ,
. Then for ,
I_{11}+c(0)I_{12}+\cdots+c(0)I_{1n}=cI_{11}=c\vert cI\vert_{n-1}=cc^{n-1}=c^n)
Proof of property 3
For  , where
, where  , we have . For
, we have . For  , the definition
, the definition  allows us to sum by row or by column. Suppose we sum by row, we have . Since we are allowed to choose any column to execute the summation, we can always select the column
allows us to sum by row or by column. Suppose we sum by row, we have . Since we are allowed to choose any column to execute the summation, we can always select the column  such that
such that  . Therefore, if the elements of one of the columns of are all zero.
. Therefore, if the elements of one of the columns of are all zero.
Proof of property 4
Let’s suppose is obtained from by multiplying the -th row of by . If we expand  and
and  along row , cofactor
along row , cofactor  is equal to cofactor
is equal to cofactor  . Therefore,
. Therefore,

Proof of property 5
For a type I elementary matrix,  transforms by swapping two rows of . So,
transforms by swapping two rows of . So,  due to property 8. Since
due to property 8. Since  is obtained from by swapping two rows of , we have
is obtained from by swapping two rows of , we have  according to property 1 and property 8, which implies that
according to property 1 and property 8, which implies that  . Therefore,
. Therefore,  .
.
For a type II elementary matrix,  due to property 4 and
due to property 4 and  because of property 1. So, .
because of property 1. So, .
For a type III elementary matrix,
A_{pj}=\sum_{j=1}^na_{pj}A_{pj}+k\sum_{j=1}^na_{qj}A_{pj}=\vert A\vert+k\vert B\vert)
 is computed by expanding along row . The equation
is computed by expanding along row . The equation  means that when is computed by expanding along row , it has the same cofactor as when is computed by expanding along row . This implies that
means that when is computed by expanding along row , it has the same cofactor as when is computed by expanding along row . This implies that  . Since the definition of the determinant of is
. Since the definition of the determinant of is  , which in our case is equivalent to , we have
, which in our case is equivalent to , we have  . Thus
. Thus  , which according to property 9, gives:
, which according to property 9, gives:

Since  ,
,

according to eq5 and property 1.
Comparing eq5 and eq6, .
Proof of property 6
Case 1
If is singular, where , then  is also singular according to property 12. So, .
is also singular according to property 12. So, .
Case 2
If is non-singular, it can always be expressed as a product of elementary matrices:  . So,
. So,
\vert)
Since property 5 states that  ,
,

Similarly, \vert=\vert\varepsilon_1\vert\vert\varepsilon_2\vert\cdots\vert\varepsilon_k\vert) . Substitute this in the above equation, .
. Substitute this in the above equation, .
Proof of property 7
Using property 6 and then property 2,

Proof of property 8
We shall proof this property by induction.  is the trivial case, where
is the trivial case, where  is the rank of a square matrix.
is the rank of a square matrix.
For , let  and
and  , which is obtained from by swapping two adjacent rows. Furthermore, let
, which is obtained from by swapping two adjacent rows. Furthermore, let ^{1+j}m_{1j}^A) and
and ^{1+j}m_{1j}^B) . Clearly,
. Clearly,
=-\vert A\vert)
Let’s assume that for  , when two adjacent rows are swapped. For
, when two adjacent rows are swapped. For  , we have:
, we have:
Case 1: Suppose that the first row of is not swapped when making .
^{1+j}M_{1j}^B=\sum_{j=1}^na_{1j}(-1)^{1+j}M_{1j}^B)
 is the determinant of a rank matrix, which is the same as except for two adjacent rows being swapped. Therefore,
is the determinant of a rank matrix, which is the same as except for two adjacent rows being swapped. Therefore,  and
and ^{1+j}M_{1j}^A=-\vert A\vert) .
.
Case 2: If the first two rows of are swapped when making ,

We have ^{1+j}M_{1j}^A) and
and ^{1+k}M_{1k}^B=\sum_{k=1}^na_{2k}(-1)^{1+k}M_{1k}^B) . The minors and
. The minors and  can be expressed as
can be expressed as
\sum_{k=1}^{j-1}a_{2k}(-1)^{1+k}\vert A_{kj}\vert+\sum_{k=j+1}^na_{2k}(-1)^{k}\vert A_{jk}\vert)
\sum_{j=1}^{k-1}a_{1j}(-1)^{1+j}\vert A_{jk}\vert+\sum_{j=k+1}^na_{1j}(-1)^{j}\vert A_{kj}\vert)
where  is with the first two rows, and the -th and -th columns removed.
is with the first two rows, and the -th and -th columns removed.
Therefore,
^{1+j}\biggr\[(1-\delta_{1j})\sum_{k=1}^{j-1}a_{2k}(-1)^{1+k}\vert A_{kj}\vert+\sum_{k=j+1}^na_{2k}(-1)^{k}\vert A_{jk}\vert\biggr\])
^{1+k}\biggr\[(1-\delta_{1k})\sum_{j=1}^{k-1}a_{1j}(-1)^{1+j}\vert A_{jk}\vert+\sum_{j=k+1}^na_{1j}(-1)^{j}\vert A_{kj}\vert\biggr\])
For any pair of values of and , where  , the terms in are
, the terms in are ^{1+j}\sum_{k=1}^{j-1}a_{2k}(-1)^{1+k}\vert A_{kj}\vert) , which differ from the terms in , i.e.
, which differ from the terms in , i.e. ^{1+k}\sum_{j=k+1}^{n}a_{1j}(-1)^{j}\vert A_{kj}\vert) , by a factor of -1. Similarly, for any pair of values of and , where
, by a factor of -1. Similarly, for any pair of values of and , where  , the terms in are
, the terms in are ^{1+j}\sum_{k=j+1}^{n}a_{2k}(-1)^{k}\vert A_{jk}\vert) , which again differ from the terms in , i.e.
, which again differ from the terms in , i.e. ^{1+k}\sum_{j=1}^{k-1}a_{1j}(-1)^{1+j}\vert A_{jk}\vert) , by a factor of -1. Since all terms in differ from all corresponding terms in by a factor of -1, .
, by a factor of -1. Since all terms in differ from all corresponding terms in by a factor of -1, .
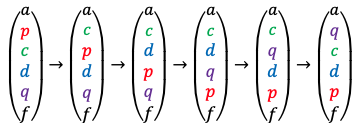
In general, the swapping of any two rows and  of , where
of , where  , is equivalent to the swapping of
, is equivalent to the swapping of -1) adjacent rows of , with each swap changing by a factor of -1. Therefore,
adjacent rows of , with each swap changing by a factor of -1. Therefore,
^{2(q-p)-1}\vert A\vert=[(-1)^2]^{p-q}(-1)^{-1}\vert A\vert=-\vert A\vert)
Finally, the swapping of any two columns is proven in a similar way.
Proof of property 9
Consider the swapping of two equal rows of to form , resulting in  and
and  . However, property 8 states that if any two rows of are swapped. Therefore,
. However, property 8 states that if any two rows of are swapped. Therefore,  if two rows of are equal. The same logic applies to proving if there are two equal columns of .
if two rows of are equal. The same logic applies to proving if there are two equal columns of .
Proof of property 10
Case 1:
If , then  according to property 13. So,
according to property 13. So,  .
.
Case 2: 
Let’s first consider elementary matrices  . A type I elementary matrix is symmetrical about its diagonal, while a type II elementary matrix has one diagonal element equal to . Therefore,
. A type I elementary matrix is symmetrical about its diagonal, while a type II elementary matrix has one diagonal element equal to . Therefore,  and thus
and thus  for type I or II elementary matrices. A type III elementary matrix is an identity matrix with one of the non-diagonal elements replaced by a constant . Therefore, if is a type III elementary matrix, then
for type I or II elementary matrices. A type III elementary matrix is an identity matrix with one of the non-diagonal elements replaced by a constant . Therefore, if is a type III elementary matrix, then  is also one. According to eq6,
is also one. According to eq6,  for a type III elementary matrix. Hence,
for a type III elementary matrix. Hence,  for all elementary matrices.
for all elementary matrices.
Next, consider an invertible matrix , which (as proven in the previous article) can be expressed as . Thus, ^T=\varepsilon_k^T\cdots\varepsilon_2^T\varepsilon_1^T) (see Q&A in the proof of property 13). According to property 5,
(see Q&A in the proof of property 13). According to property 5,

and

Therefore, .
Proof of property 11
We have  , or in terms of matrix components:
, or in terms of matrix components:
_{qk}a_{kp}=\delta_{pq}=\frac{\vert A\vert}{\vert A\vert}\delta_{pq}\;\;\;\;\;\;\;\;7)
Consider the matrix that is obtained from the matrix by replacing the -th column of with the -th column, i.e.  for
for  and
and  . According to property 9,
. According to property 9,  because has two equal columns. Furthermore, cofactor
because has two equal columns. Furthermore, cofactor  is equal to cofactor
is equal to cofactor  for . Therefore,
for . Therefore,

When  , the last summation in eq8 becomes
, the last summation in eq8 becomes

Combining eq8 and eq9, we have  , which when substituted in eq7 gives:
, which when substituted in eq7 gives:
_{qk}a_{kp}=\sum_{k=1}^n\frac{A_{kq}}{\vert A\vert}a_{kp})
Therefore, _{qk}=\frac{A_{kq}}{\vert A\vert}) , which implies that the inverse of a matrix is undefined if . In other words, the inverse of a matrix is undefined if . We call such a matrix, a singular matrix, and a matrix with an associated inverse, a non-singular matrix.
, which implies that the inverse of a matrix is undefined if . In other words, the inverse of a matrix is undefined if . We call such a matrix, a singular matrix, and a matrix with an associated inverse, a non-singular matrix.
Proof of property 12
We shall prove by contradiction. According to property 11, has no inverse if . If has no inverse and has an inverse, then ^{-1}\]=I) . This implies that has an inverse
. This implies that has an inverse  , where
, where ^{-1}) , which contradicts the initial assumption that has no inverse. Therefore, if has no inverse, then must also have no inverse.
, which contradicts the initial assumption that has no inverse. Therefore, if has no inverse, then must also have no inverse.
Proof of property 13
Question
Show that ^T=\cdots C^TB^TA^T) .
.
Answer
^T=B^TA^T) because
because
^T_{ij}=(AB)_{ji}=\sum_{k=1}^na_{jk}b_{ki}=\sum_{k=1}^n(A^T)_{kj}(B^T)_{ik}\\=\sum_{k=1}^n(B^T)_{ik}(A^T)_{kj}=(B^TA^T)_{ij})
^T=C^TB^TA^T) because
because
^T_{ij}=(ABC)_{ji}=\sum_{l=1}^n\sum_{k=1}^na_{jk}b_{kl}c_{li}=\sum_{l=1}^n\sum_{k=1}^n(A^T)_{kj}(B^T)_{lk}(C^T)_{il}\\=\sum_{l=1}^n\sum_{k=1}^n(C^T)_{il}(B^T)_{lk}(A^T)_{kj}=(C^TB^TA^T)_{ij})
which can be extended to .
Using the identity in the above Q&A, ^TA^T=(AA^{-1})^T) . If is invertible, then
. If is invertible, then ^TA^T=(AA^{-1})^T=I=(A^{-1}A)^T=A^T(A^{-1})^T) . This implies that
. This implies that ^T) is the inverse of
is the inverse of  and therefore that is invertible if is invertible.
and therefore that is invertible if is invertible.
The last part shall be proven by contradiction. Suppose is singular and is non-singular, there would be a matrix such that  , Furthermore,
, Furthermore, ^T=AB^T) , which implies that
, which implies that  . This contradicts our initial assumption that is singular. Therefore, if is singular, must also be singular.
. This contradicts our initial assumption that is singular. Therefore, if is singular, must also be singular.
Proof of property 14
We shall proof this property by induction. For ,

Let’s assume that  for . Then for
for . Then for  , the cofactor expansion along the first row is
, the cofactor expansion along the first row is